XUC
второе пришествие
- Регистрация
- 3 Сен 2006
- Сообщения
- 872
- Реакции
- 574
- Автор темы
- #21
Honda с канадскими учёными создала чувствительную искусственную кожу для роботов
Группа учёных из Университета Британской Колумбии в сотрудничестве с исследователями компании Honda разработала чувствительную к воздействию искусственную кожу для роботов. Разработка была продемонстрирована как основа для манипулятора, одинаково бережно сжимающего куриное яйцо и тонкий стеклянный стакан с водой.
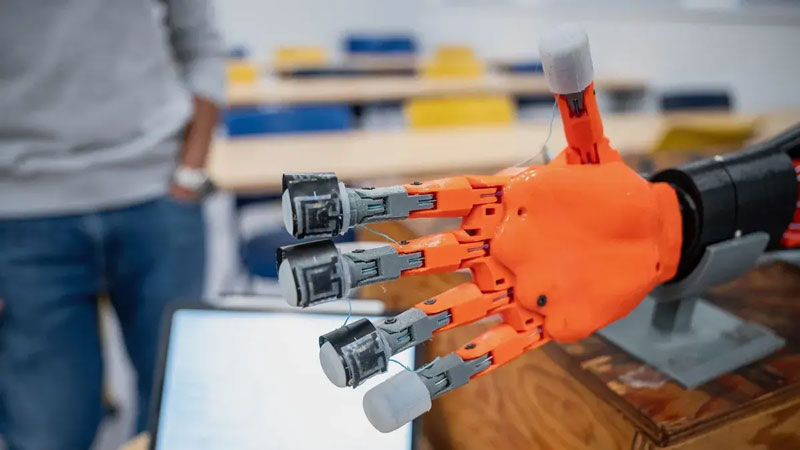
Источник изображения: UBC Applied Science/Paul Joseph
Очевидно, что роботы, которые будут осуществлять свою деятельность рядом с человеком, должны обладать чувствительным внешним покрытием. В первую очередь это касается тактильных ощущений, которые позволят искусственному интеллекту или программе правильно рассчитать силу сжатия конечностей. Робот ведь может не только подать стакан. Он может помочь человеку подняться или перенести его в инвалидное кресло, если будет служить сиделкой.
Для обретения роботами чувствительности учёные разработали пригодный для недорогого и массового производства датчик на основе силиконовой резины. Предложенная конструкция не только сжимается в ответ на нажим, она также идёт складками, если усилия распространяются в продольном направлении. Именно так работает человеческая кожа. Но в отличие от кожи, которая имеет сотни чувствительных рецепторов на малую единицу площади, искусственная кожа пока не может похвастаться подобными свойствами.
Создание более чувствительных датчиков позволит научить роботов тонким ручным операциям от шитья до сборки мелких деталей в одно целое. Когда-нибудь так и произойдёт, а пока подать стакан с водой целым — это тоже достижение.
Источник: Для просмотра ссылки Войдиили Зарегистрируйся
Группа учёных из Университета Британской Колумбии в сотрудничестве с исследователями компании Honda разработала чувствительную к воздействию искусственную кожу для роботов. Разработка была продемонстрирована как основа для манипулятора, одинаково бережно сжимающего куриное яйцо и тонкий стеклянный стакан с водой.
Источник изображения: UBC Applied Science/Paul Joseph
Очевидно, что роботы, которые будут осуществлять свою деятельность рядом с человеком, должны обладать чувствительным внешним покрытием. В первую очередь это касается тактильных ощущений, которые позволят искусственному интеллекту или программе правильно рассчитать силу сжатия конечностей. Робот ведь может не только подать стакан. Он может помочь человеку подняться или перенести его в инвалидное кресло, если будет служить сиделкой.
Для обретения роботами чувствительности учёные разработали пригодный для недорогого и массового производства датчик на основе силиконовой резины. Предложенная конструкция не только сжимается в ответ на нажим, она также идёт складками, если усилия распространяются в продольном направлении. Именно так работает человеческая кожа. Но в отличие от кожи, которая имеет сотни чувствительных рецепторов на малую единицу площади, искусственная кожа пока не может похвастаться подобными свойствами.
Создание более чувствительных датчиков позволит научить роботов тонким ручным операциям от шитья до сборки мелких деталей в одно целое. Когда-нибудь так и произойдёт, а пока подать стакан с водой целым — это тоже достижение.
Источник: Для просмотра ссылки Войди